ロボット知能化演習の課題
| ロボットものづくりの内、ロボット制御するソフトウエアに重きをおいた演習です。アクリル製の直方体の筐体で、2個のステッピングモータ駆動の車輪で移動します。 前後左右に赤外線を用いた距離センサを搭載しています。ロボット上部には、前後左右の光量を計測する光センサを搭載しています。全ての方向の光を見逃さないように、12個の光センサを等間隔で設置し、 3個一組で前後左右各方向の光を検出するようにしています。ロボットコンテストの課題は、距離センサで壁までの距離を知り、光センサでランプを見つけ、壁にぶつからないようにして、 早くランプのそばに近づくことです。この制御をロボット内のマイコンにダウンロードしたプログラムで自律的に行います。動画でロボットにつながっているコードは電源用のコードで、 パソコンとの通信用のコードではありません。 | 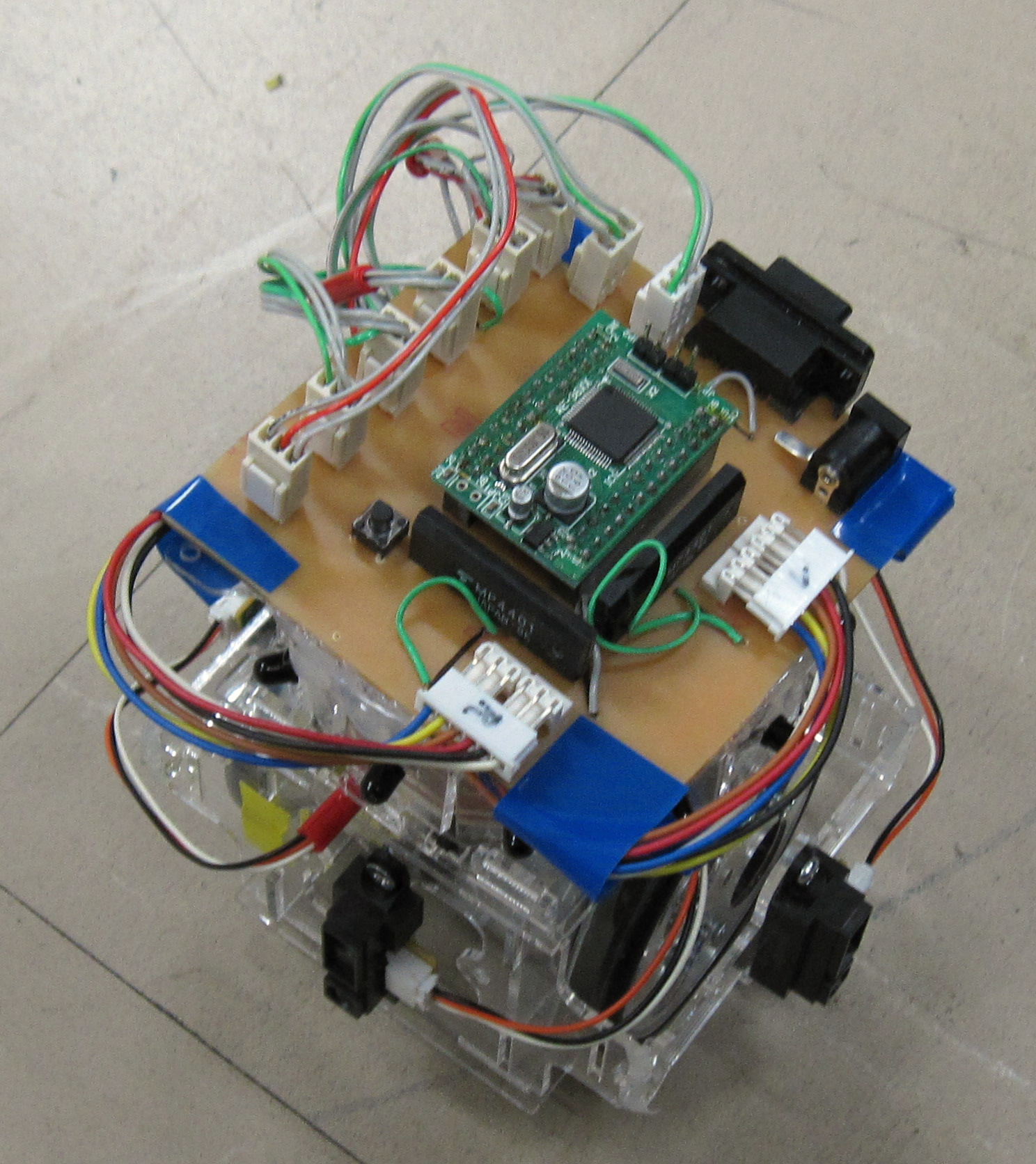 キューブロボット |
キューブロボットの製作


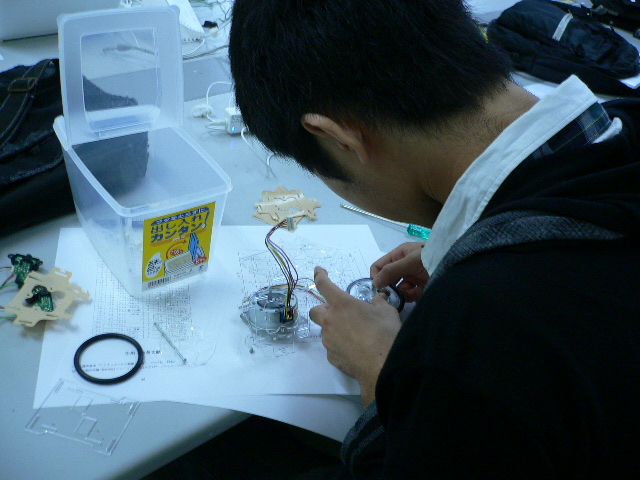
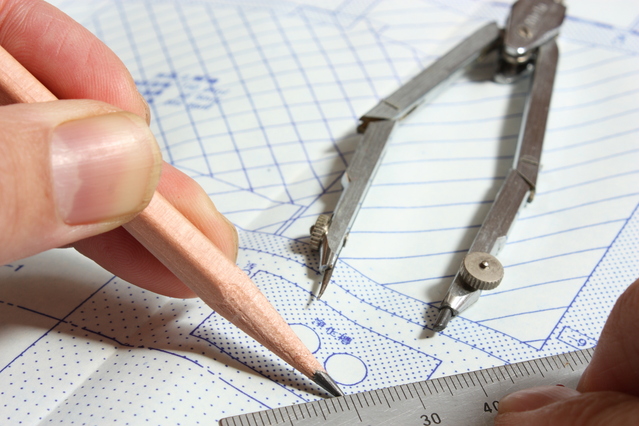
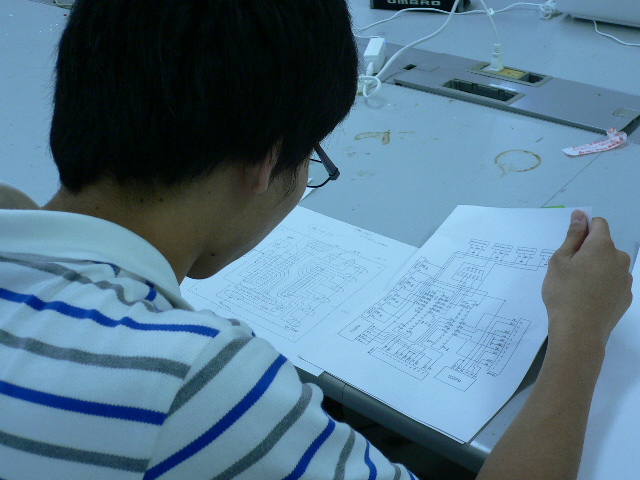
ロボットは、図面を見ながら組み立てていきます。
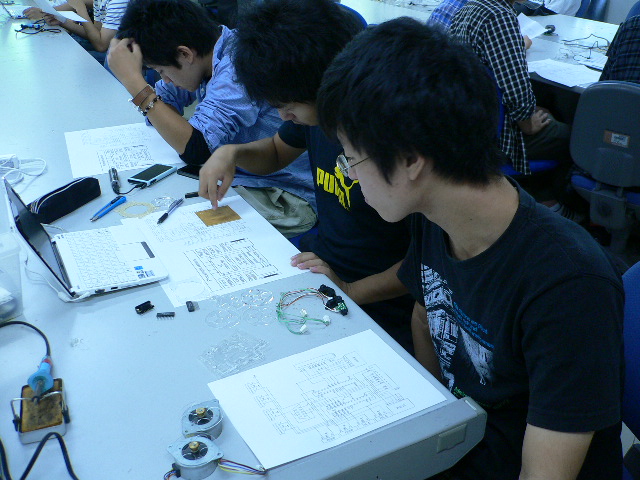
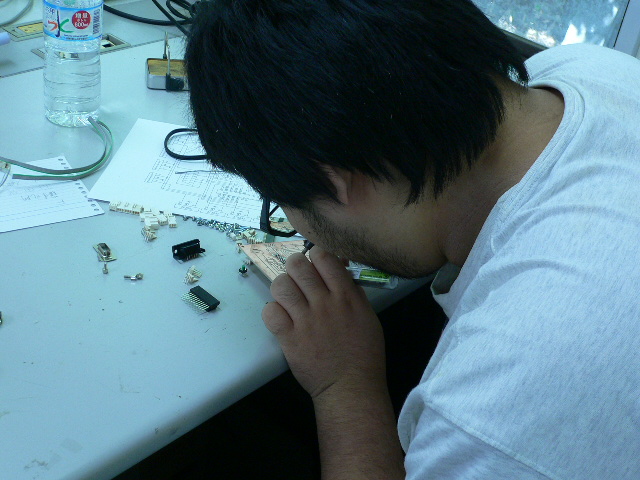
平行して、回路図を見ながら、モータを駆動したり距離や光を検知するための制御回路を作っていきます。

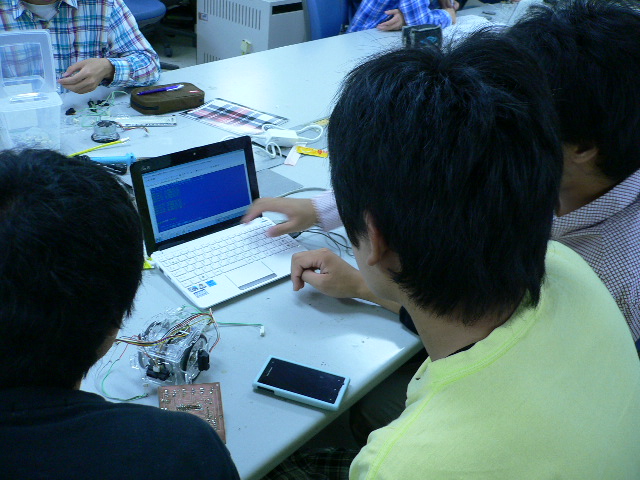
さらに、ロボットを制御するためのプログラムを作っていきます。

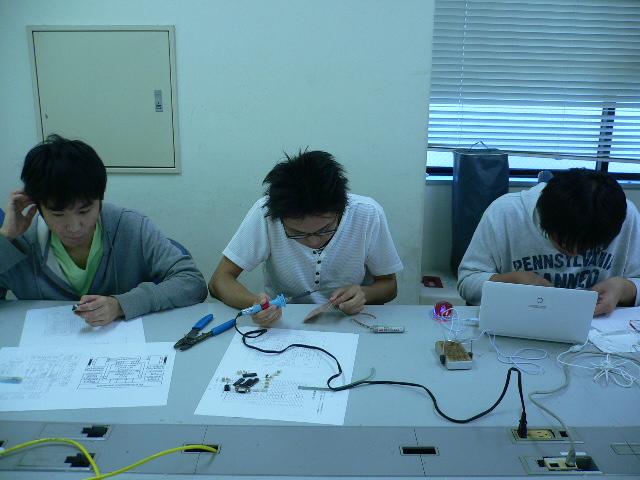

チーム3人でそれぞれ作業を分担し、協力しながらロボットを作り上げていきます。
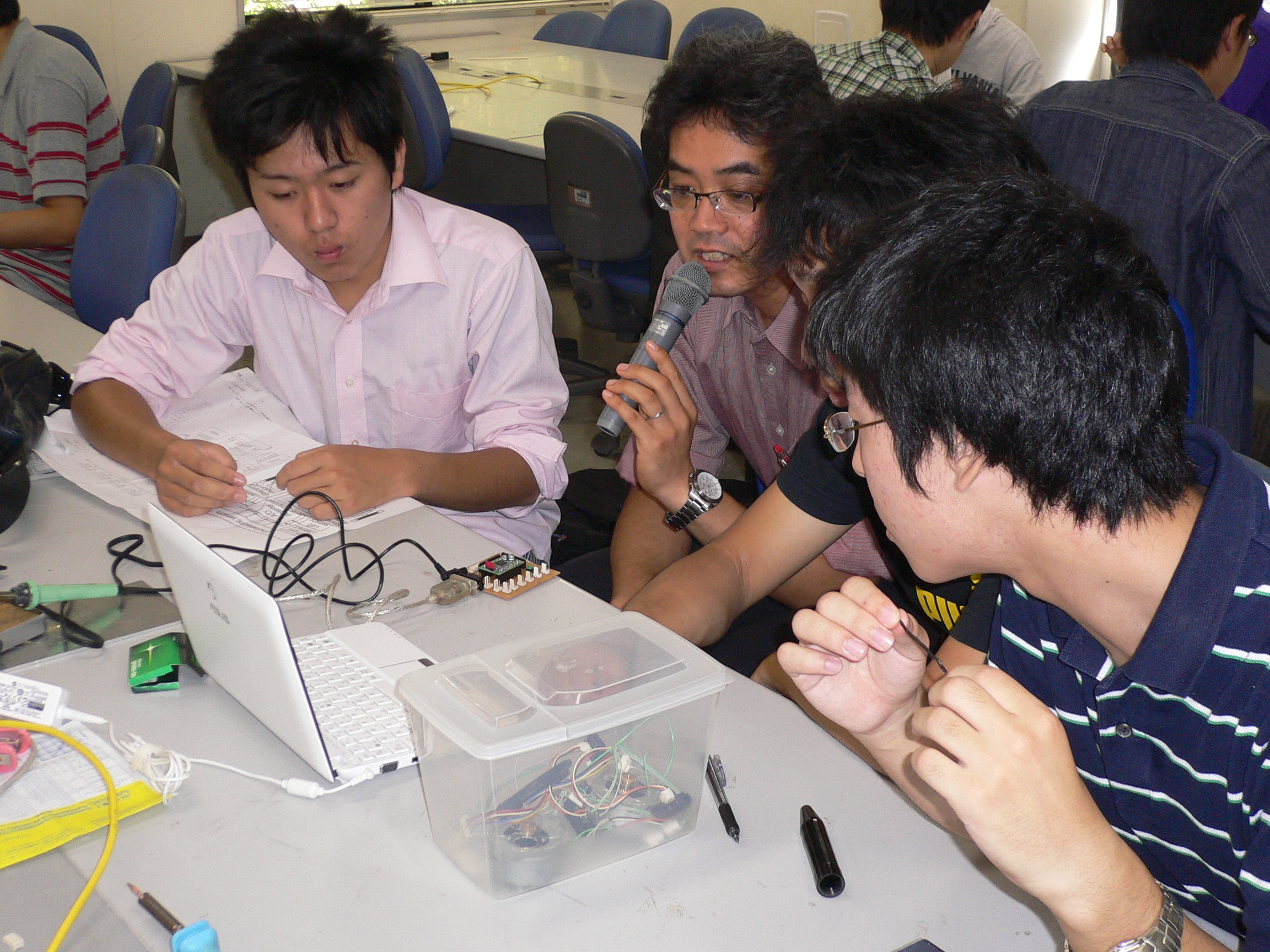


回路とプログラムが完成したらマイコンにプログラムを書き込みます。
つづく