「ロボット知能化演習」ロボットコンテスト2024開催
ロボット知能化演習の課題
| ロボットものづくりの内、ロボット制御するソフトウエアに重きをおいた演習です。アクリル製の直方体の筐体で、2個のステッピングモータ駆動の車輪で移動します。前後左右に赤外線を用いた距離センサを搭載しています。ロボット上部には、前後左右の光量を計測する光センサを搭載しています。全ての方向の光を見逃さないように、12個の光センサを等間隔で設置し、3個一組で前後左右各方向の光を検出するようにしています。ロボットコンテストの課題は、距離センサで壁までの距離を知り、光センサでランプを見つけ、壁にぶつからないようにして、早くランプのそばに近づくことです。この制御をロボット内のマイコンにダウンロードしたプログラムで自律的に行います。動画でロボットにつながっているコードは電源用のコードで、パソコンとの通信用のコードではありません。 今年度は2022年度設置された情報理工学部2期生の講義です。A7号館2階ものづくり実習室で、ロボット作りの全工程の詳細な説明書と説明の動画を見ながら、要所で教員や先輩学生のアドバイスを受けて、ロボット作りを行いました。 ロボットコンテストは、A7号館2階ものづくり実習室で2025年2月3日に開催されました。 |
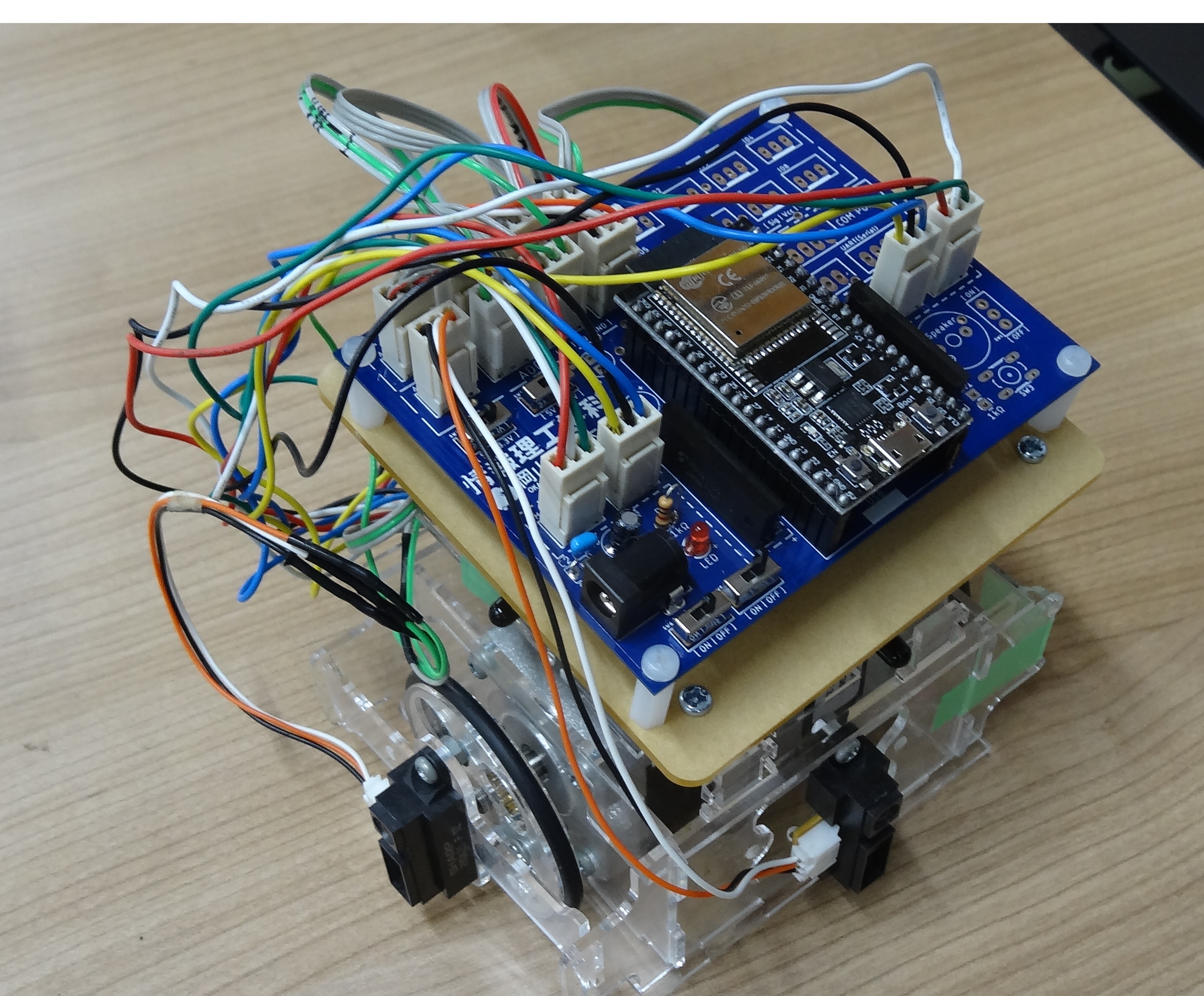 キューブロボット |
ロボット作りの様子



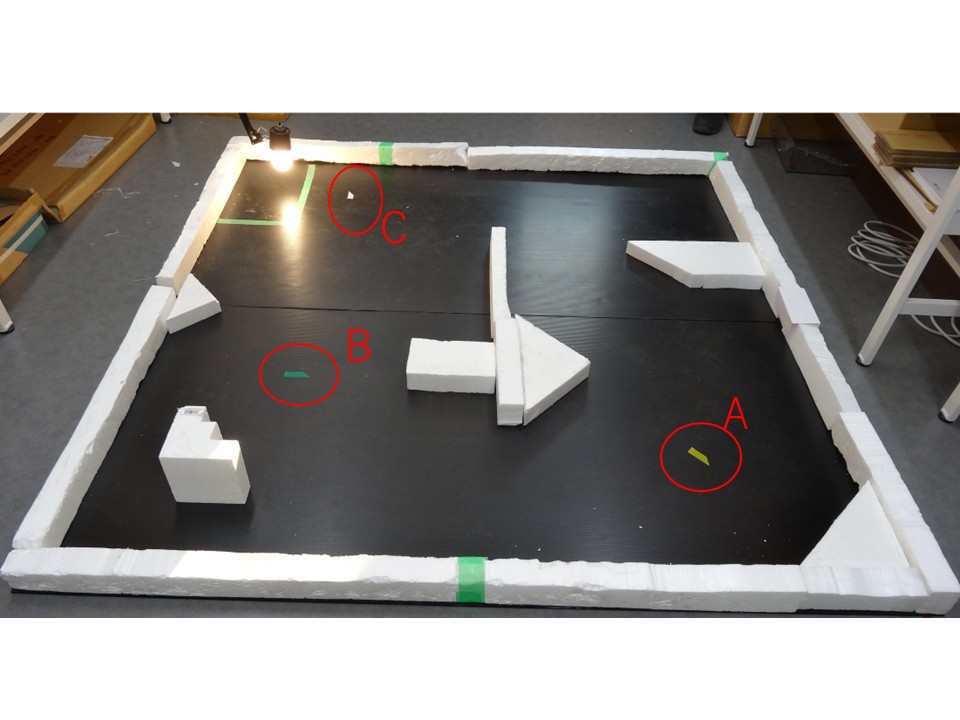
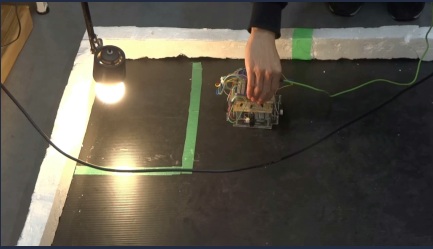
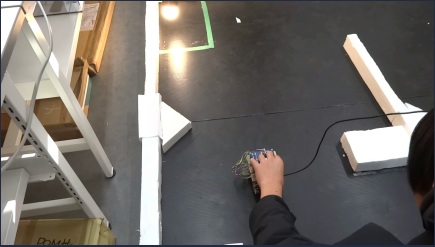
コンテストのフィールド
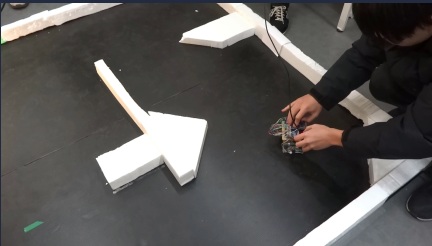
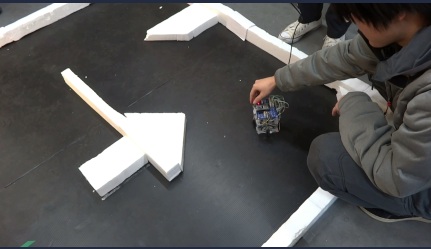
コンテストの様子
ロボットコンテストのフィールドはA7号館2階ものづくり実習室の隣の準備室に設置しました。準備室は狭いので、限られた人数しか準備室に入れません。そこで、フィールドの上にカメラを設置しロボットを動かしている班以外の学生は、ものづくり実験室でカメラのライブ映像を見る形で実施しました。ロボットの動画
| C地点からの制御 | B地点からの制御 |
 |
 |
| A地点からの制御(1) | A地点からの制御(2) |
 |
 |
コンテスト結果
A地点、B地点、C地点からランプ近くに到達するまでのタイムトライアルを行いました。下記の表は各地点からの最短タイムです。今年度は、C地点から順番に試す方式ではなく、最初から各チームの申告によりスタート地点を決めて行いましたので、A地点からのゴール到達が可能だと考えているチームは、A地点のみのトライアルとなりました。C地点やB地点から行ったのは、A地点からの到達が難しいと考えているチームだけでしたので、C地点、B地点ともスムーズに到達できたロボットは少数でした。| 班 | C地点 (s) | B地点 (s) | A地点 (s) | 順位 |
| A | - | - | - | 12 |
| B | 31.87 | - | - | 11 |
| C | 7.65 | 33.1 | - | 8 |
| D | - | - | 33.5 | 3 |
| E | 4.82 | - | - | 9 |
| F | - | - | - | 12 |
| G | - | - | - | 12 |
| H | - | - | - | 12 |
| I | 24.66 | - | - | 10 |
| J | - | 10.57 | - | 6 |
| K | - | 19.41 | - | 7 |
| L | - | 12.25 | 19.53 | 1 |
| M | - | 7.44 | 19.69 | 2 |
| N | 1.97 | 14.4 | 36.16 | 4 |
| O | - | - | - | 12 |
| P | - | - | 47.28 | 5 |